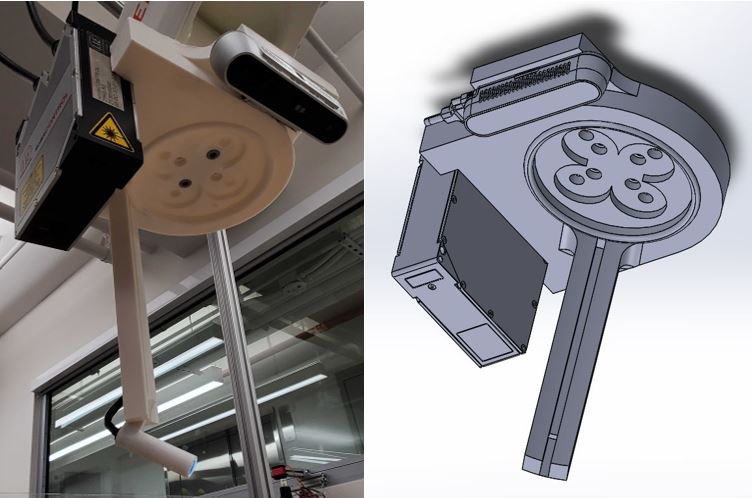
I designed a custom tool holder for affixing a Real Sense 3D camera, a laser scanner, and a vision camera onto a Denso robot.
-------------------------------------------------------------------------------------------------------------
- The design procedure involved iterative analyses of optimal sensor positions for viewing, and parametric testing for ensuring the stability and safety of the sensors.
- This holder also safely complies with the depowdering robot's tool changing mechanism to be autonomously attached and detached.
Contribution to the Research Project:
Skills Involved: