Depowdering Robot
Lead Mechanical Design Researcher
CERLAB - Carnegie Mellon University
Goal of Depowdering Robot
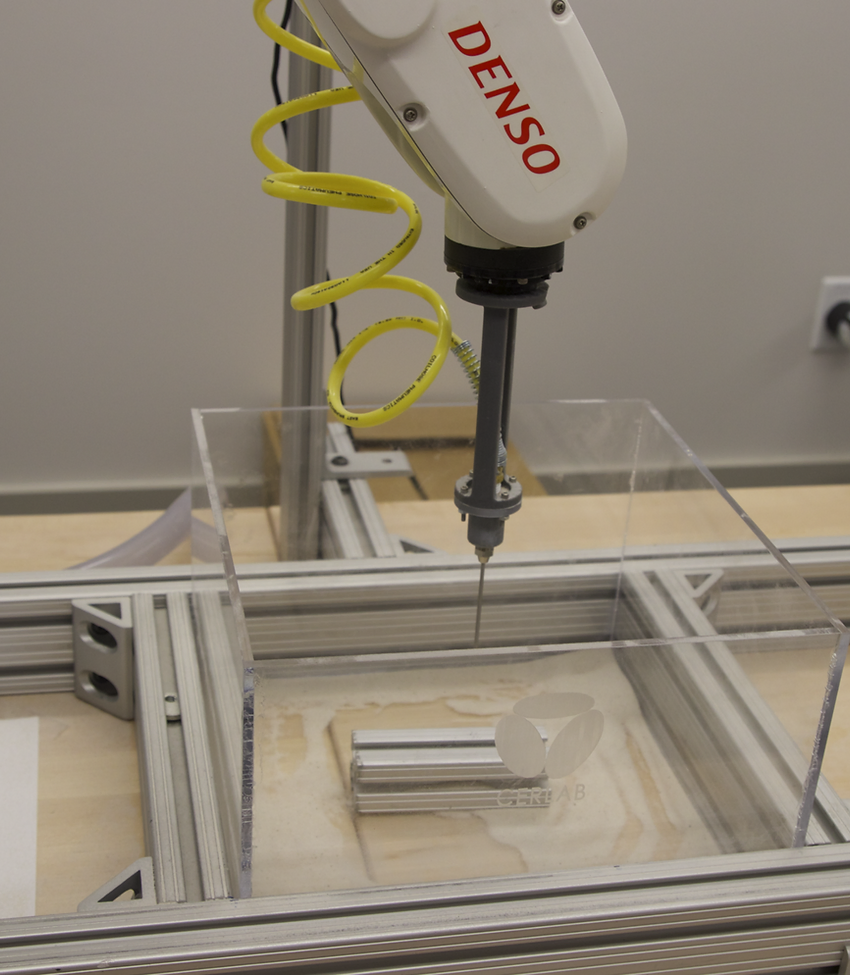
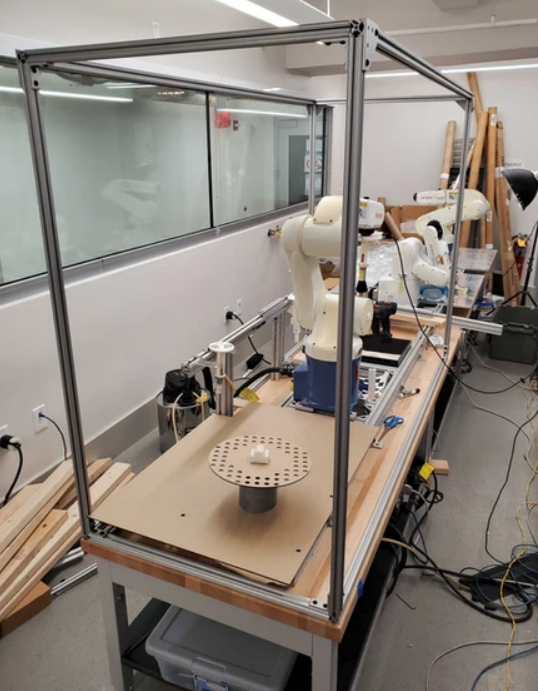
I lead a team of undergraduate students to design and program a robotic system for removing metal/sand powder from a binder jetting metal/sand 3D print.
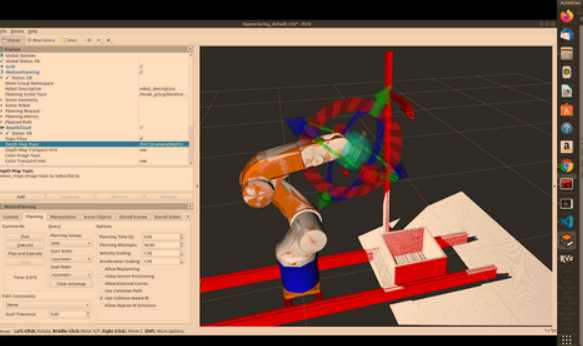
I use computer vision and 3D sensors to generate optimal robot paths within ROS (Robotics Operating System), as well as CAD with laser cutting and 3D printing to design and test an efficient powder-removing robot.
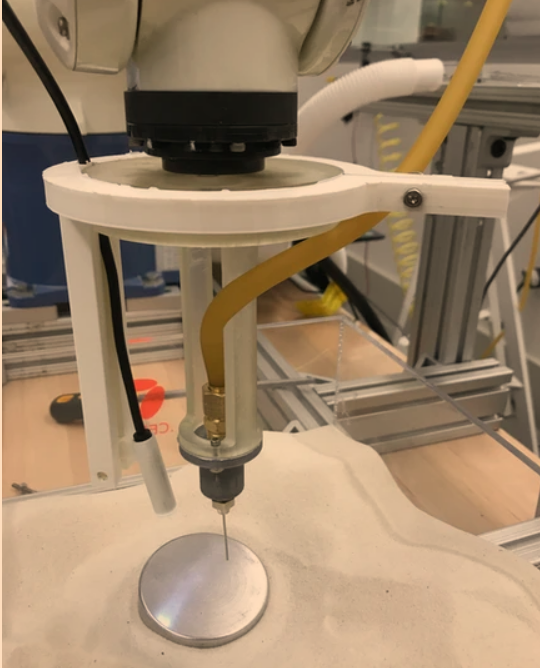
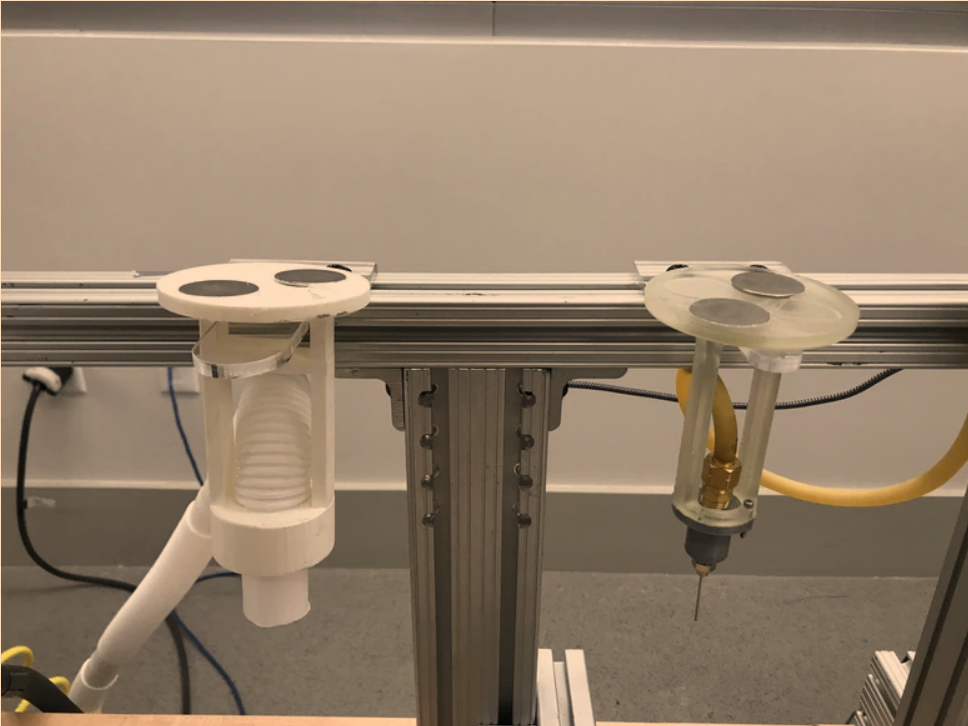
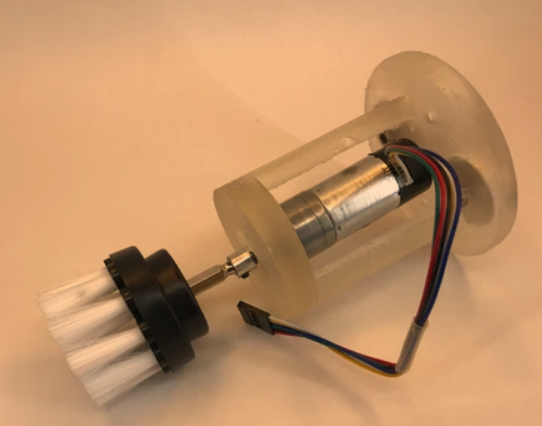
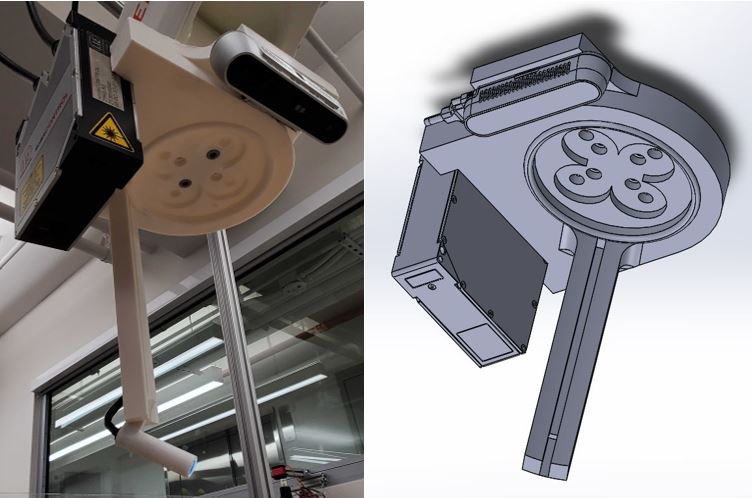
The robot works by using custom made vacuum, blower, and brush systems to clean the powder off a part
Individual Developments

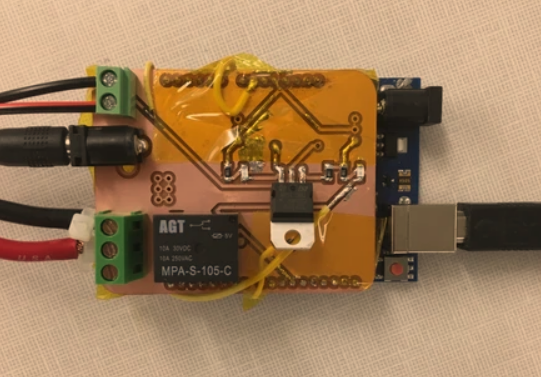
Pressure Gauge Controller
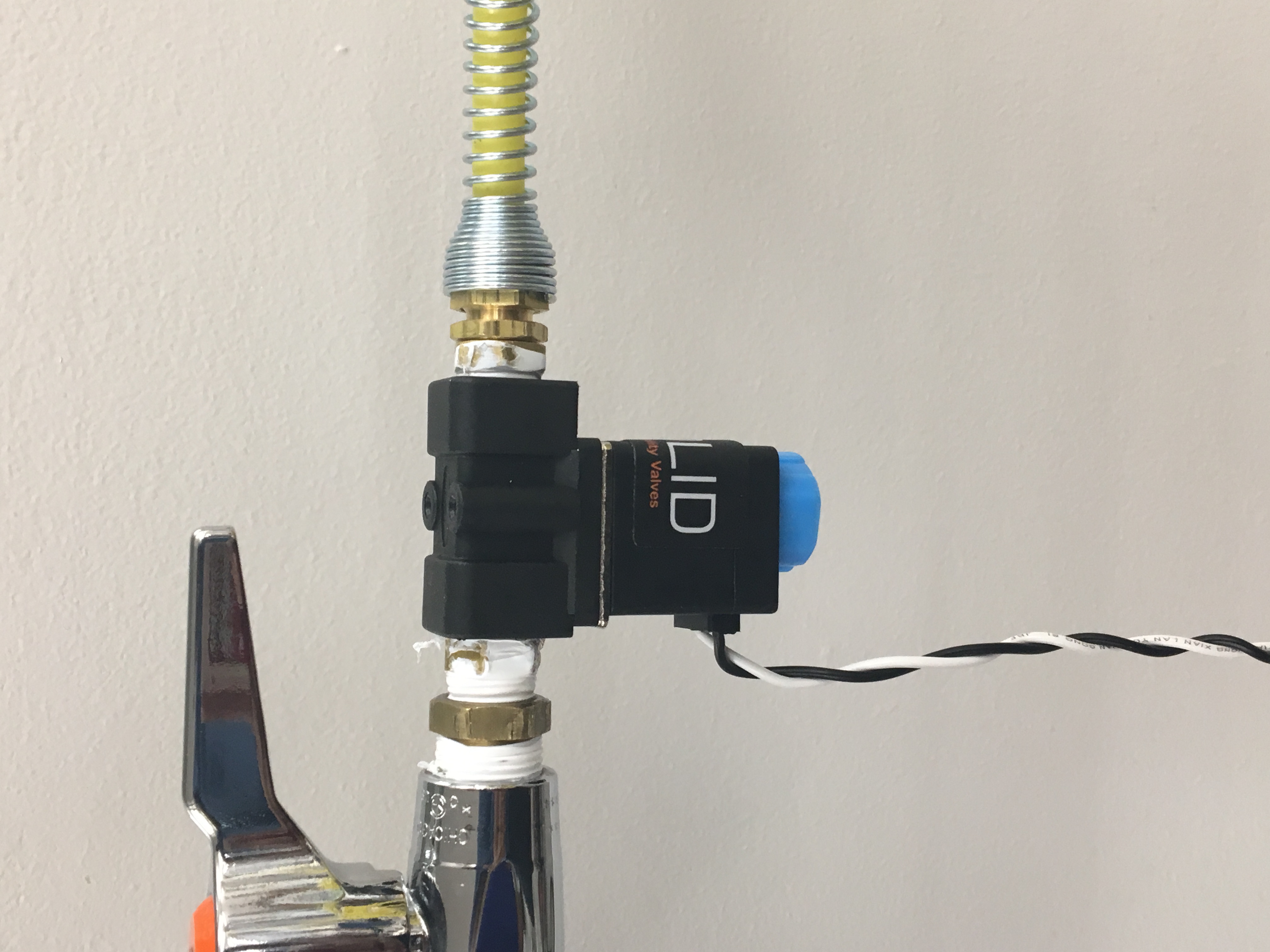
Solenoid Valve Relay

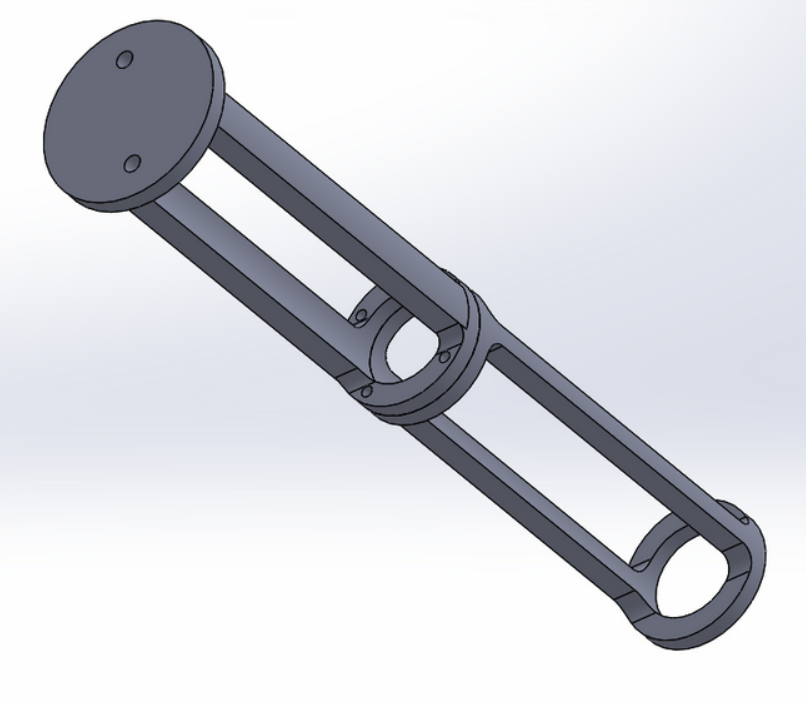
Custom Lock Collar
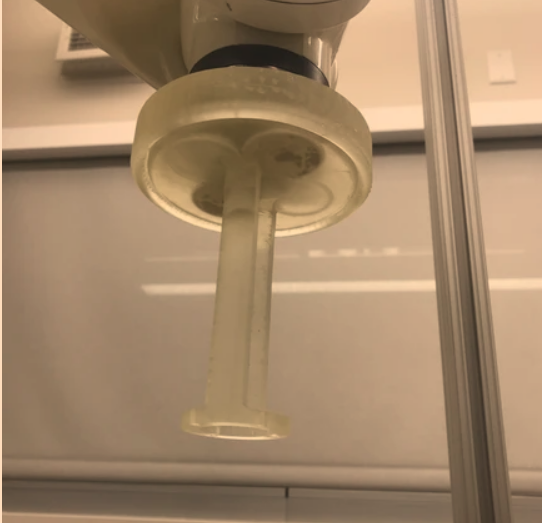
Custom End Effector for Vacuum Tube