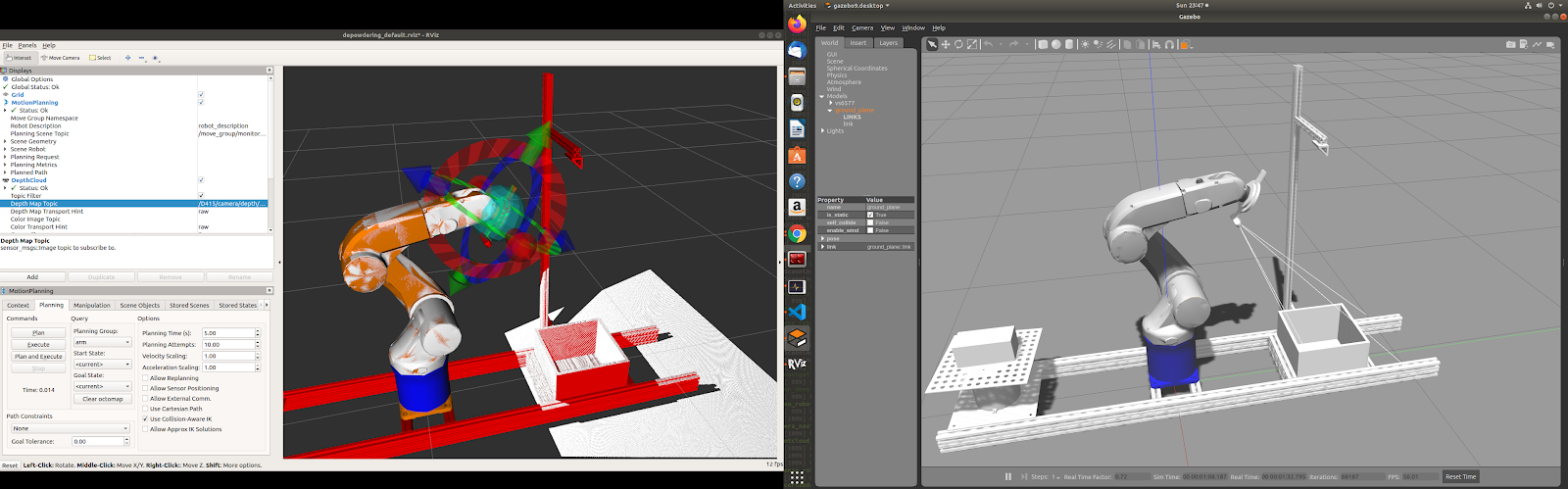
We use RViz in ROS to simulate our project environment with Gazebo software.
Simulating processes allow us to model real-world behavior for path planning and optimizing sensor data output (laser scanner and 3D sensor).
Contribution to the Research Project:
Skills Involved: